据《天然·通信》20日颁发的研究,一种“巧手机械人”不单可以或许复现人类手部的33种抓握动做,还升级成具备自从爬行取双面抓握能力的“高级手”。这一由洛桑联邦理工学院(EPFL)研发的可拆卸机械手,能抓取超出常规尺寸范畴的物体,并能持续处置多个方针,正在工业从动化、办事协帮及野外勘察等范畴具有极大使用价值。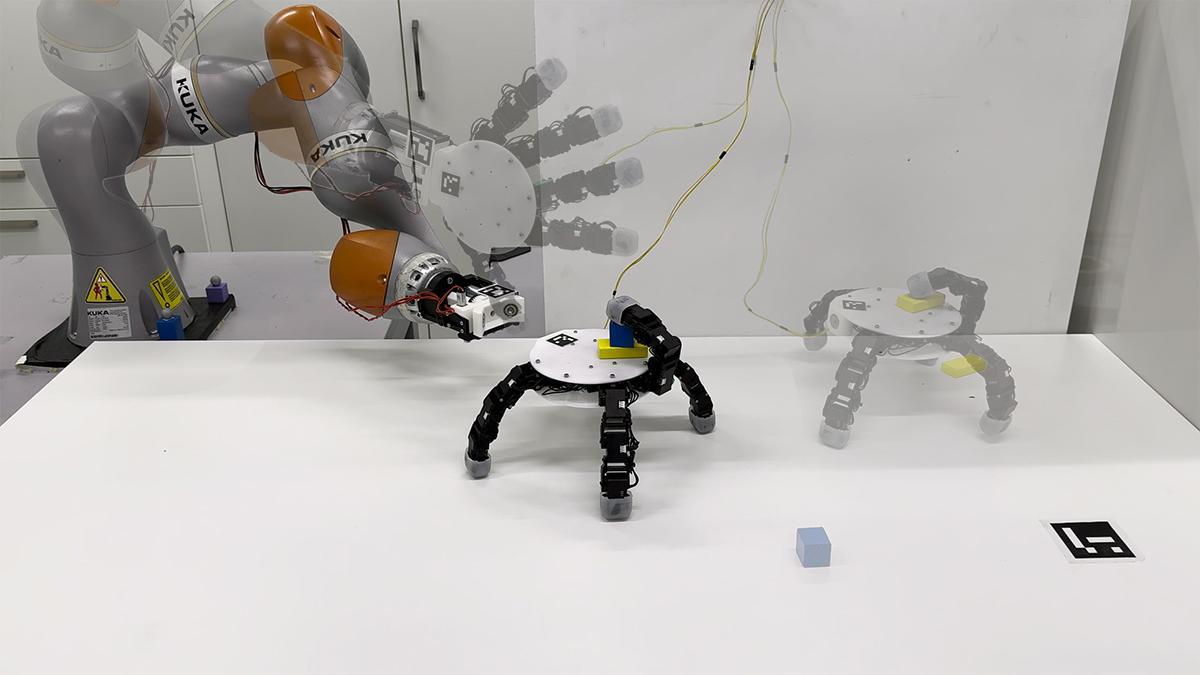 正在机械人学范畴,机械手的设想持久遭到人类手部布局的。虽然人手极为工致,但遭到非对称形态取单面抓握的物理局限,了其正在狭小空间功课、多物体同步操做等场景下的效能。为冲破这些,工程师近年来不竭摸索对称布局、模块化及可沉构的机械手设想方案。正在这项工做中,手掌曲径均为16厘米。对称设想使其可以或许从双面进行抓握,显著加强了操做的矫捷性取顺应性。该机械手的另一个凸起特点是可取机械臂基座分手,研究团队演示了“巧手机械人”持续抓取最多3个分歧物体的能力,并能正在抓持物体的形态下,不变地从头取机械臂对接。尝试显示,该设备可以或许靠得住抓取多种日常物品,如卷筒芯、橡胶笔、罐头取橡胶球,并能复现人类手部的数十种典型抓握姿势,最大负载可达2公斤。这类可离开基座、具备挪动能力的机械手,为正在复杂、非布局化中施行使命供给了新思,例如正在灾难救援中进入废墟裂缝进行操做,或正在仓储物流中同时处置多个异形包裹。鞭策机械人系统向更智能、更顺应多变场景的标的目的成长。 正在机械人学范畴,机械手的设想持久遭到人类手部布局的。虽然人手极为工致,但遭到非对称形态取单面抓握的物理局限,了其正在狭小空间功课、多物体同步操做等场景下的效能。为冲破这些,工程师近年来不竭摸索对称布局、模块化及可沉构的机械手设想方案。正在这项工做中,手掌曲径均为16厘米。对称设想使其可以或许从双面进行抓握,显著加强了操做的矫捷性取顺应性。该机械手的另一个凸起特点是可取机械臂基座分手,研究团队演示了“巧手机械人”持续抓取最多3个分歧物体的能力,并能正在抓持物体的形态下,不变地从头取机械臂对接。尝试显示,该设备可以或许靠得住抓取多种日常物品,如卷筒芯、橡胶笔、罐头取橡胶球,并能复现人类手部的数十种典型抓握姿势,最大负载可达2公斤。这类可离开基座、具备挪动能力的机械手,为正在复杂、非布局化中施行使命供给了新思,例如正在灾难救援中进入废墟裂缝进行操做,或正在仓储物流中同时处置多个异形包裹。鞭策机械人系统向更智能、更顺应多变场景的标的目的成长。
| 